无人机精准变量喷施作业系统(定制版)

1. 起飞前检查
飞行器首飞或更换飞行场地后,请按以下步骤进行检查:
- 检查喷头、水管、折叠连接件的展开或禁锢情况(尤其是机臂处的紧固件)。
- 检查定位状态是否为定点 RTK,再检查地面站中航向角与实际机头方向是否正确
(详见第 4 章“飞行主显示界面”中的定位信息及航向角显示)。 - 连接地面站,然后进行马达测试,检查电机运行是否正常
(详见第 6 章“参数设置”中的 6.4.6 马达测试)。 - 遥控器检查模式通道,确认飞行器是否能正常响应
(详见第 2 章“遥控器各项功能”)。 - 姿态解锁起飞,空中切换到定位模式进行首次试飞。正常后,即可使用定位模式正常起降。
(飞行模式切换可参考第 4 章“飞行主显示界面”中的当前飞行模式显示)
2. 遥控器各项功能

- X1、Y1、X2、Y2为航向、俯仰、横滚、油门(为日本手设置,可在遥控器的APP H16助手中切换为美国手)
- SW1飞行模式:上为悬飞(GPS模式)、中为高度保持、下为姿态
- SW2水泵开关:上为开启、中下为关闭
- AUX1云台变焦:左旋为缩小、右旋为放大
- AUX2播撒转盘:左旋为慢转速(最左为关闭)、右旋为快转速
- SW3录像 拍照:上为录像(重复拨触发开与关)、中为空挡、下为拍照(重复拨触发开与关)
- SW4自驾航线:上为切换至自驾(属于飞行模式)、中下为退出自驾(退出时以SW1的模式为准)
- X3、Y3为云台的航向、俯仰
- A:为第10通道,此通道为空余通道无设置
- B-F播撒投料阀:此通道用于开投料阀,B为窄,B到F逐渐为宽
3. 地面站安装及飞行器连接
3.1. 地面站安装
地面站软件使用 APP 的方式发布,使用时只需软件下载安装至手机即可。后续按飞行器连接说明进行操作即可,连接方式请查阅 3.5。

3.2. 参数设置界面
未连接飞行器时点击左上角的齿轮即可进入未连接飞行器状态下的设置界面。
注意:软件若出现显示不全的情况,请在分辨率处选择“低”然后点击保存设置再重启软件。

3.3. 视频地址的设置
在通用设置界面中(上述 3.2)
- 打开视频窗口选择网络视频
- 填写视频地址:
rtsp://192.168.144.108:554/stream=0 - 然后选择解码方式:
mediacodec - 点击保存设置即可在主界面显示视频窗口
注意:如果画面无法恢复,请重启软件。

3.4. 地面站许可证管理
连接飞行器后会自动获取飞行器许可证(注意软件要连接网络),若未连接成功详见3.5连接飞行器。
注意:对于同一 SN 但不同功能的许可证,同时只可以启用其中一个。

3.5. 连接飞行器
点击右上角的连接按钮,使用中间的 UDP 连接功能。
注意:端口需设置为 14551。

4. 飞行主显示界面
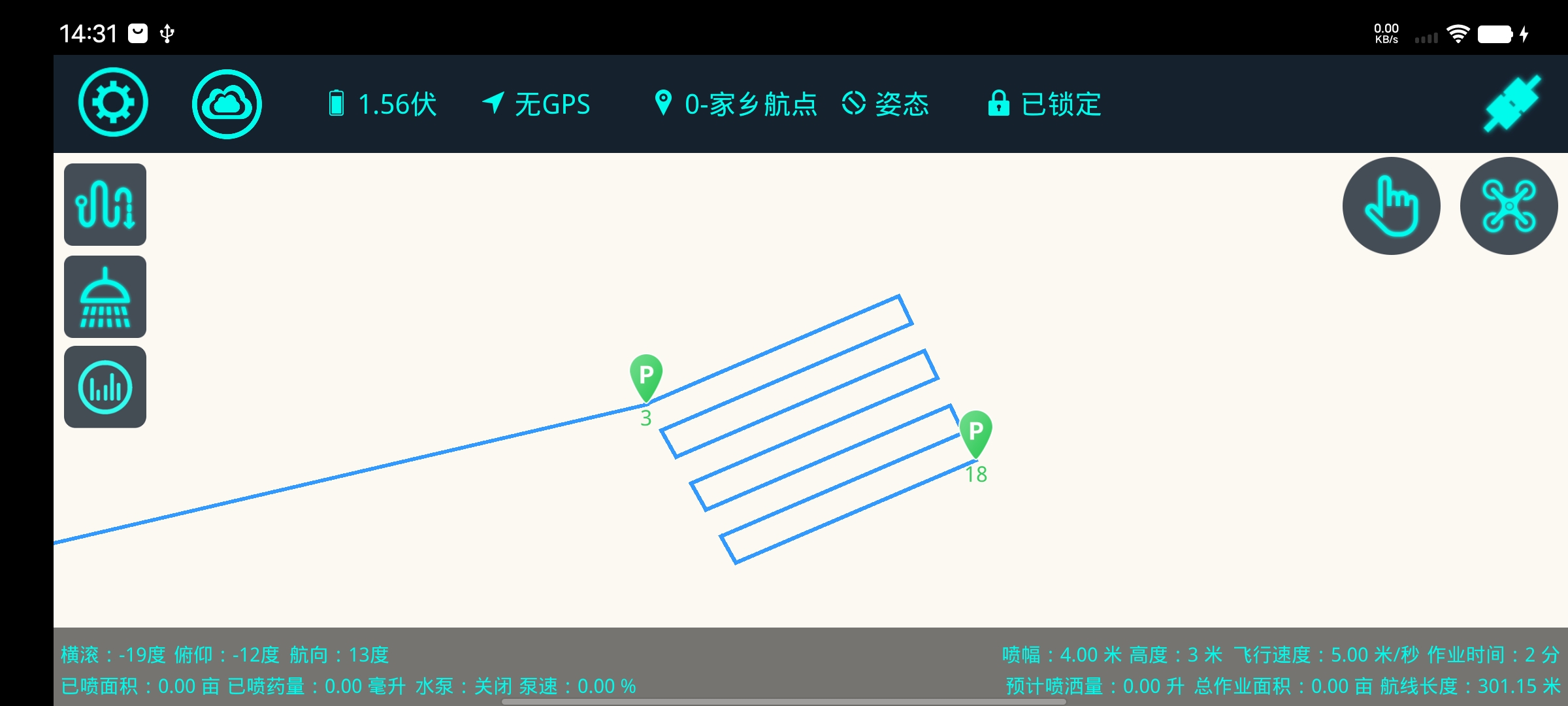
下图为地面站的飞行主显示界面,飞行器的各项信息栏与航线规划都在此界面操作。
界面介绍表:
| 序号 | 名称 | 说明 |
|---|---|---|
| 1 | 上方显示栏 | 从左到右为:设置界面(齿轮图标)、云账号登陆、电池电压、GPS 定位状态、航点激活、当前飞行模式、飞行器是否解锁 |
| 2 | 便捷功能按钮 | “手指”中的工具为(从左到右):航线删除、距离测量工具、返航点显示居中、飞行轨迹清除 未折叠的工具:飞行器持续居中。 |
| 3 | 左边一列工具栏 | 从上至下为:规划航线、喷洒记录、飞行器详细信息 |
| 4 | 左下方飞行器信息栏 | 横滚、俯仰、航向角度、已喷面积、已喷药量、水泵状态、当前水泵百分比功率。 |
| 5 | 右下方航线信息栏 | 设置的喷幅、航线的高度、航线的速度、预计总作业时间、预计喷洒量、预计总作业面积、总航线长度 |
5. 航线管理
5.1. 航点激活
点击上方的被跟踪航点即会弹出航点列表
然后选择想要开始的航点,点击激活,然后进入自驾模式,飞行器就会从激活的航点开始作业。
说明:在处方图的航线作业中,中断航线时可以记下当前到最近的哪个航点结束的,下次再执行此航线时激活该航点再遥控器的拨SW4的自驾即可,以实现航线续飞。
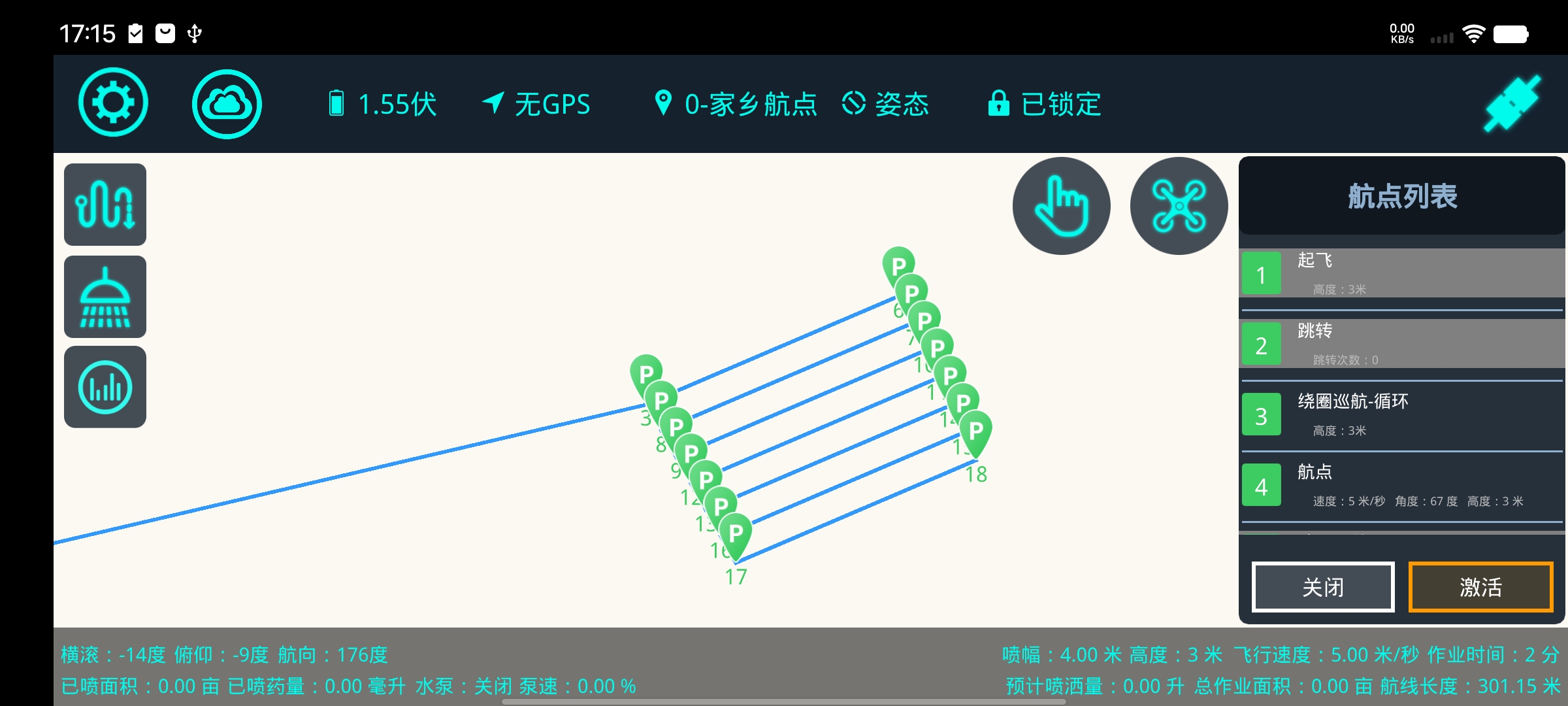
5.2. 喷洒航线规划
在主界面点击喷洒航线

会弹出喷洒航线规划界面。
航线规划的步骤如下:
点击新增地块之后出现两种打点模式:地图打点、飞行器打点。

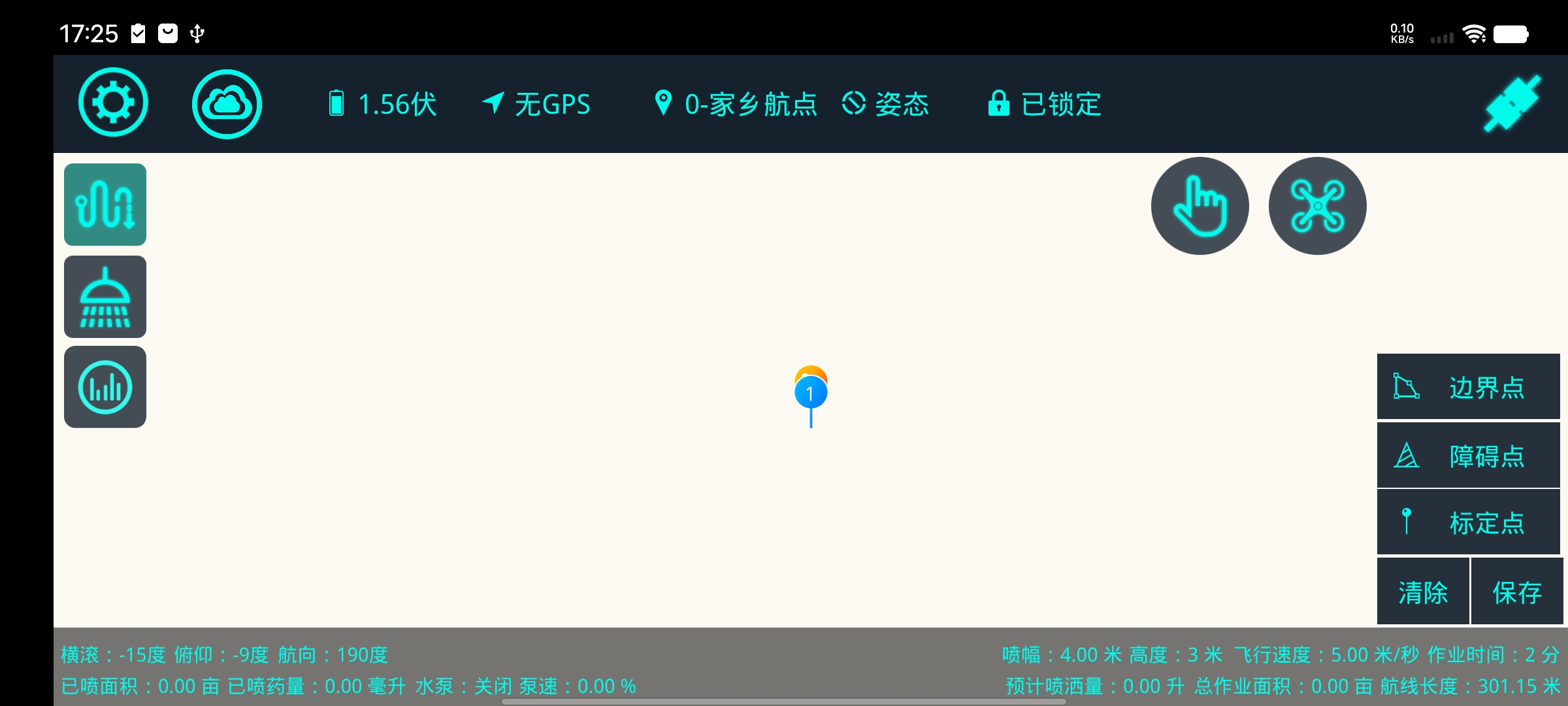
5.2.1. 地图打点功能
-
步骤 1:通过飞行器飞行轨迹或地图显示确认好位置后,移动打点的图标到对应位置,然后点击边界点
就会生成一个蓝色带编号的边界点。
-
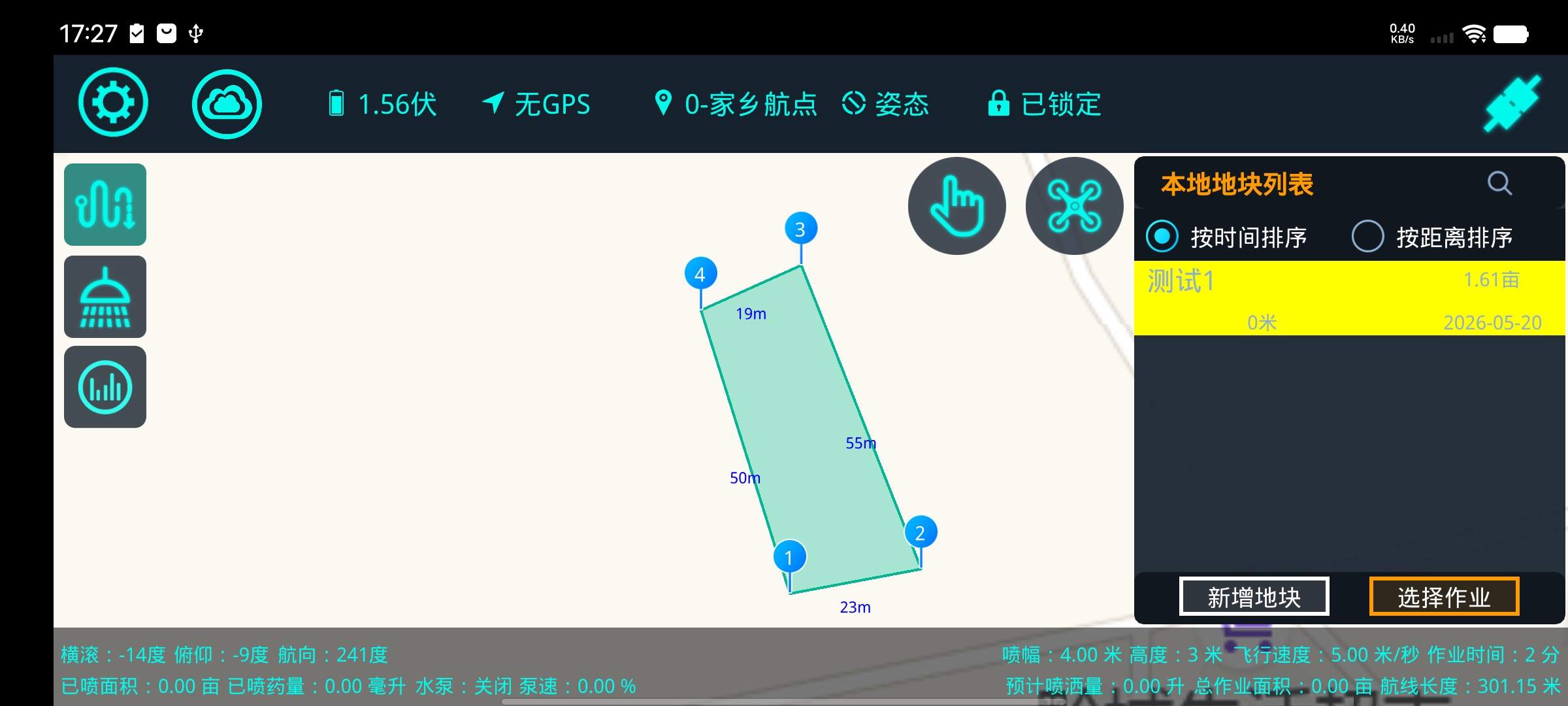
步骤 2:点击好 3 个边界点及以上点击保存然后命名即可。
-
步骤 3:再次打开规划航线界面,选择规划好的地块,点击选择作业。
- 步骤 4:加载处方图
-
点击药量控制
进入到下图界面

点击打开,找到准备好的CSV文件

若地块不正确可以点击使用处方图数据控制作业范围,并点击确定
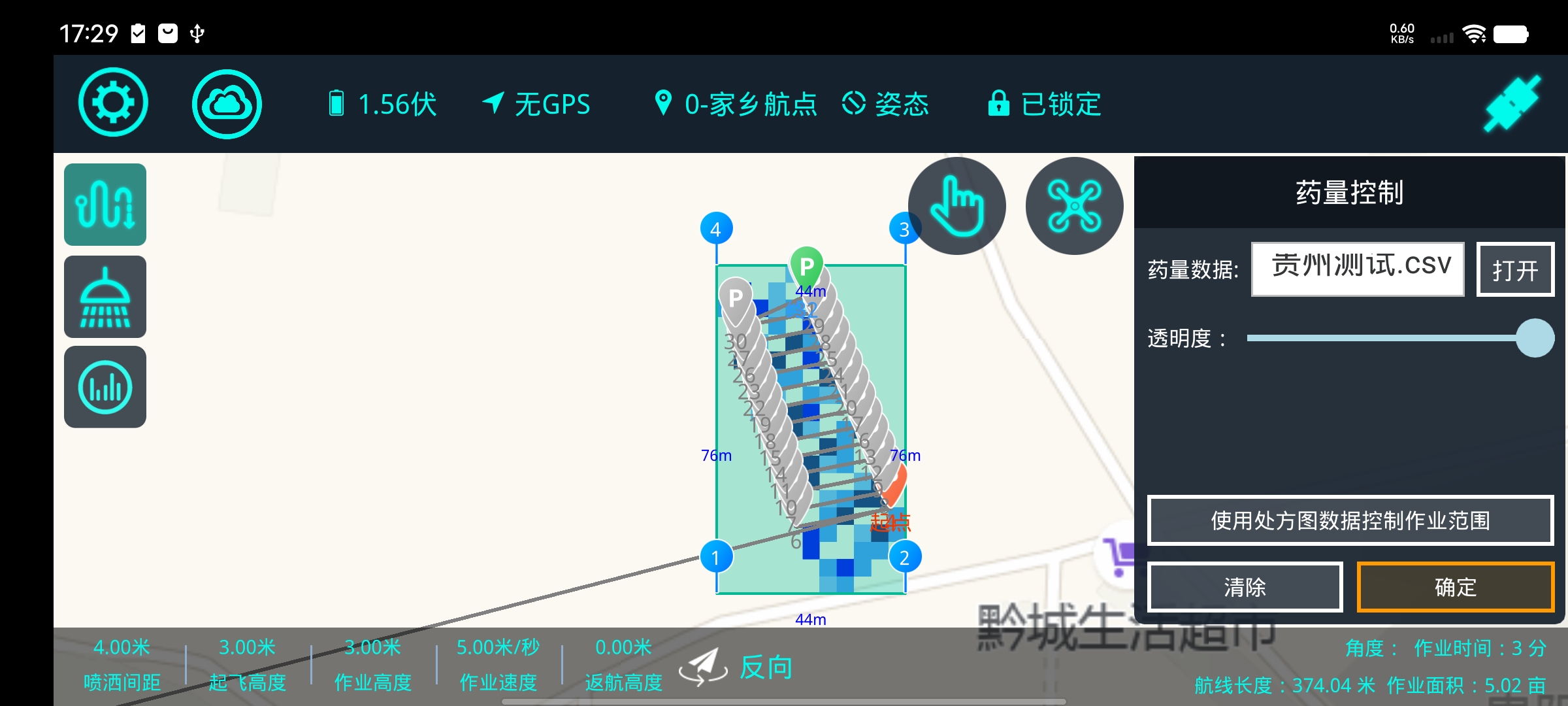

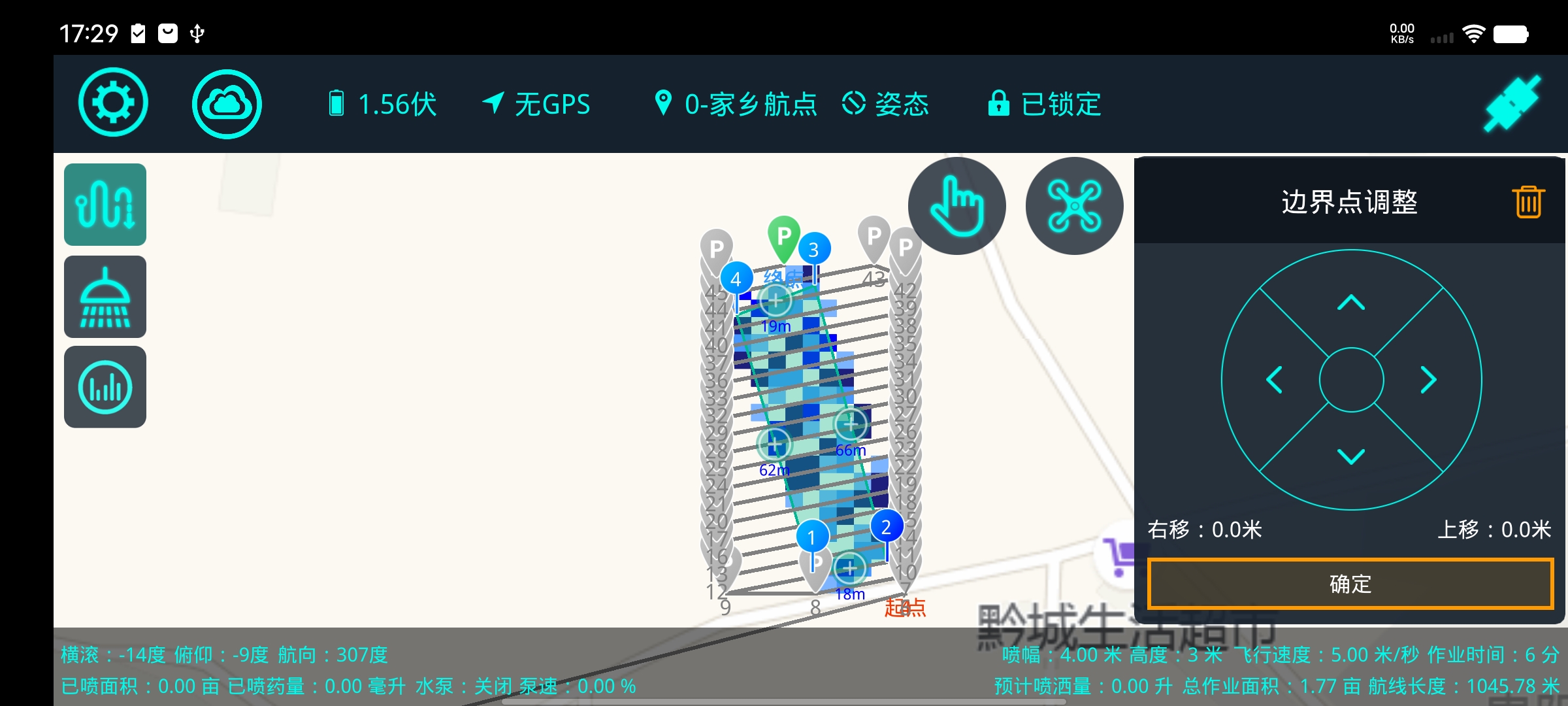
此时范围一般比较大,可以点击修改地块
重新修正地块,再保存或覆盖之前规划的场地。
-
通过旋转圆盘或者选中场地边界调整航线的方向,下方的反向也可以改变航线方向。

-
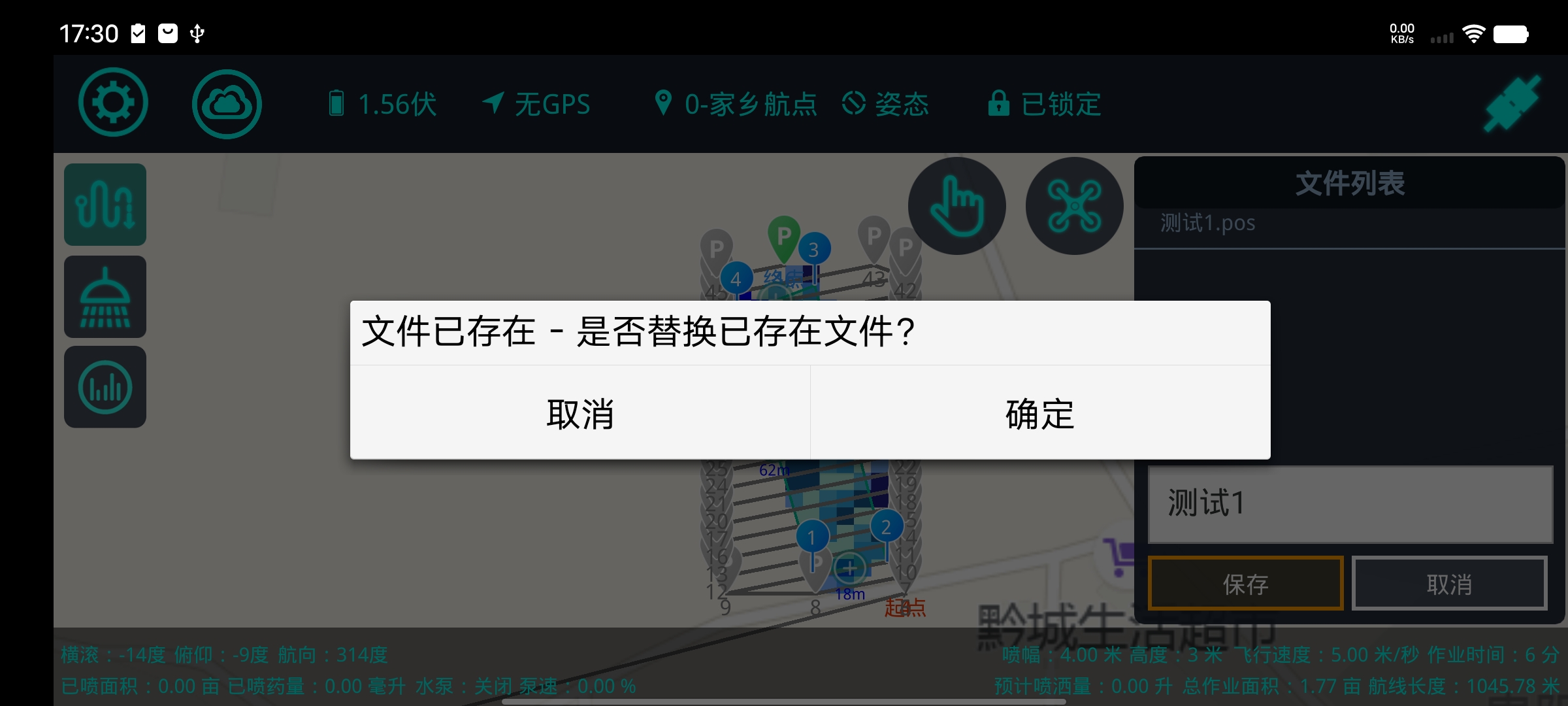
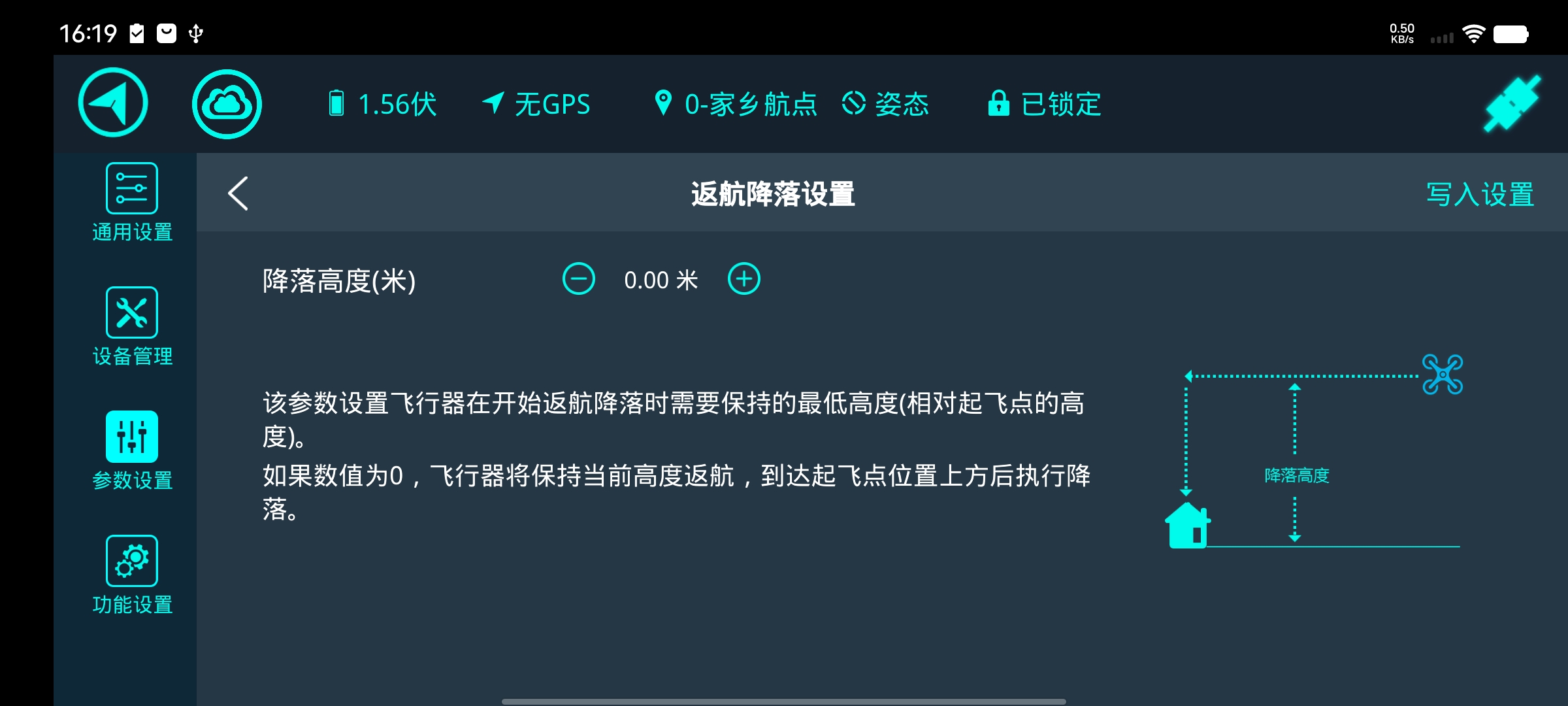
点击左下角的参数,设置航线的间距、起飞高度、作业高度、作业速度、返航高度(当返航高度设置为 0 时则按照飞行器当前的高度返航)。
-
确认航线无误后,上传航线。
-
说明:在设置了航线参数后,会提示设置亩用量的值,按照6.1.3喷洒设置中提到的公式,推算出需要的亩用量设置就行。后续可以在5.1的航点列表中查询航点的喷洒量是否正确。若修改亩用量,修改后需要回到航线中重新点击上传航线。
5.2.2. 多边形障碍点和圆形障碍点
- 步骤 1:在地图打点中点击障碍点,选择多边形或圆形。
- 步骤 2:打完点后点击保存进行重命名即可。
- 步骤 3:点击障碍点地块选择作业。
- 步骤 4:进入参数调整界面
- 设置飞行器的间距、起飞高度、作业高度、作业速度、返航高度,调整滑轮选择合适的角度。
- 障碍点航线默认为绕形航线,单击后使其变为折返航线,根据不同的场景进行应用。
- 航线确认无误后上传航线即可。
6. 参数设置
连接飞行器后点击左上角的参数设置
可以进入下图界面

6.1. 重要设置说明
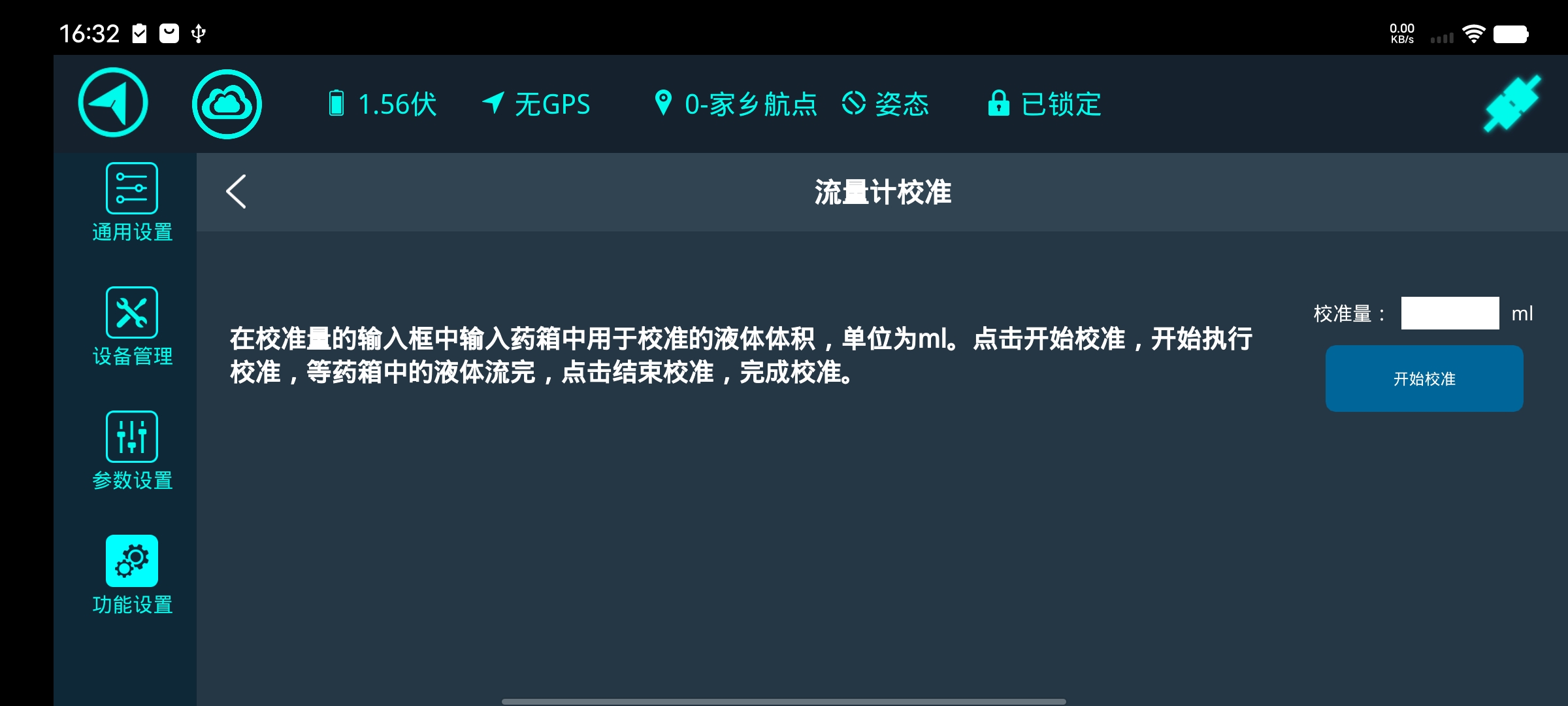
6.1.1. 流量计校准
在功能设置界面点击流量计校准。
校准前准备
- 准备5L左右的水导入水箱,激活喷洒开关,确认水泵是否能正常工作(并把水喷完)
开始校准
- 准备20L水,倒入飞行器水箱
- 下图界面输入2000,然后点击开始校准
- 水泵自动开始全速工作
- 水抽不出来时,马上点击结束校准
- 水泵停止工作,至此就完成校准
6.1.2. 流量计设置
在功能设置界面点击流量计设置。
- 目前飞行器定制使用的是涡轮流量计
- 保护模式启用后,可选返航降落,在飞行器触发低药量警报时,会自动切换到返航降落模式(若需要退出返航降落模式,可通过遥控器SW1通道进行模式的覆盖切换)

6.1.3. 喷洒设置
在功能设置界面点击喷洒设置。
功能介绍:
- 喷洒开关:启用后水泵才能工作
- 双水泵:目前定制版本的是单水泵,此项保持禁用即可
- 速控喷洒:实现处方图功能时,此项需要启用
说明:速控喷洒开启后,在遥控器打开喷洒开关后,飞行器必须有飞行速度才会开始喷洒,即飞行器在悬停时是不会喷洒的。若关闭速控喷洒,在遥控器打开喷洒开关后会以设置的速率全速喷洒。因此请按需求设置速控喷洒开关。
- 喷洒间距:与航线的间距设置为同一项(一般是手动飞行时设置)
- 喷洒水泵速率:为水泵的最大喷洒速率
- 起喷比例:为水泵初始的最低喷洒速率,一般建议设置为20%,以保证在最低喷洒时水泵能抽出水量,否则可能会触发低药量警报)
- 亩用量:单位ml/亩
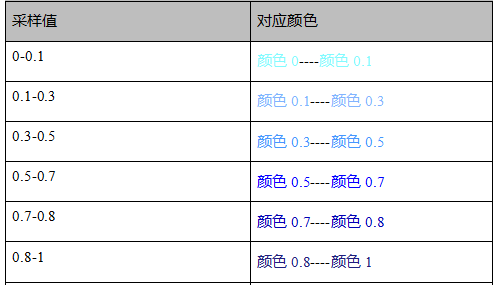
- 设置施药量系数为1的登记:一共6级
- 单位处方格施药变量:每级相差的施药量,单位ml/㎡
说明:最大等级单位处方格喷洒量(ml)=亩用量/2000/3/单位处方格面积;颜色对应的等级分布图(从上至下为1-6级):

6.4. 其它设置说明
6.4.1. 通用设置界面

包含功能如下:
- 语言切换
- 地图切换
- 视频窗口的使用
- 当前地面站软件版本
- 双天线定向系统设置(本飞行器为定制版本,无需对此进行设置)

6.4.2. 设备管理界面

包含功能如下:
- 磁罗盘校准(本飞行器为定制版本,使用的是双天线定向)
- 磁罗盘干扰校准(未拆卸桨叶时请勿使用此功能)(本飞行器为双天线定向,无需使用此功能)
- 马达测试
- 遥控器设置(本飞行器为定制版本,通道功能已设置完成)
- 由于使用的通道非常多,非必要不建议用户再进行设置,以免出现通道功能重叠
- 电池设置
- 机架设置(本飞行器为定制版本,无需对此进行设置)
- 传感器位置设置(本飞行器为定制版本,无需对此进行设置)
- 加速度计校准(本飞行器为定制版本,无需对此进行设置)
- 云台控制设置(本飞行器为定制版本,无需对此进行设置)

6.4.3. 参数设置界面

包含功能如下:
- 返航降落设置
- 电池保护安全
- 飞行设置
- 参数配置更新

6.4.4. 功能设置界面

包含功能如下:
- 流量计校准设置
- 流量计设置
- 喷洒设置
- 仿地飞行设置(本飞行器为定制版本,无需对此进行设置)
- 避障设置(本飞行器为定制版本,无需对此进行设置)
- 电子围栏
- 日志下载(手持端不方便连接飞行器,需要日志下载时请使用PC地面站连接)

6.4.5. 返航降落设置
在参数设置界面中进入返航设置界面

- 返航降落飞行器会先爬升或下降至设置高度,再进行返航;
- 返航高度设置 0 米时,会直接在当前飞行高度执行返航。
6.4.6. 马达测试
在设备管理界面点击马达测试

马达测试用于测试以下内容:
- 飞行器的电机转向及状态(转动是否有异响)
- 桨翼安装是否有误
- 激活的电机与实际转动的电机是否一致
提示 1:飞行模式必须为姿态模式;
提示 2:若电机不转,可适当增大油门百分比。
注意:若飞行器带有桨翼,油门百分比不可设置大于 20,否则会有侧翻危险。

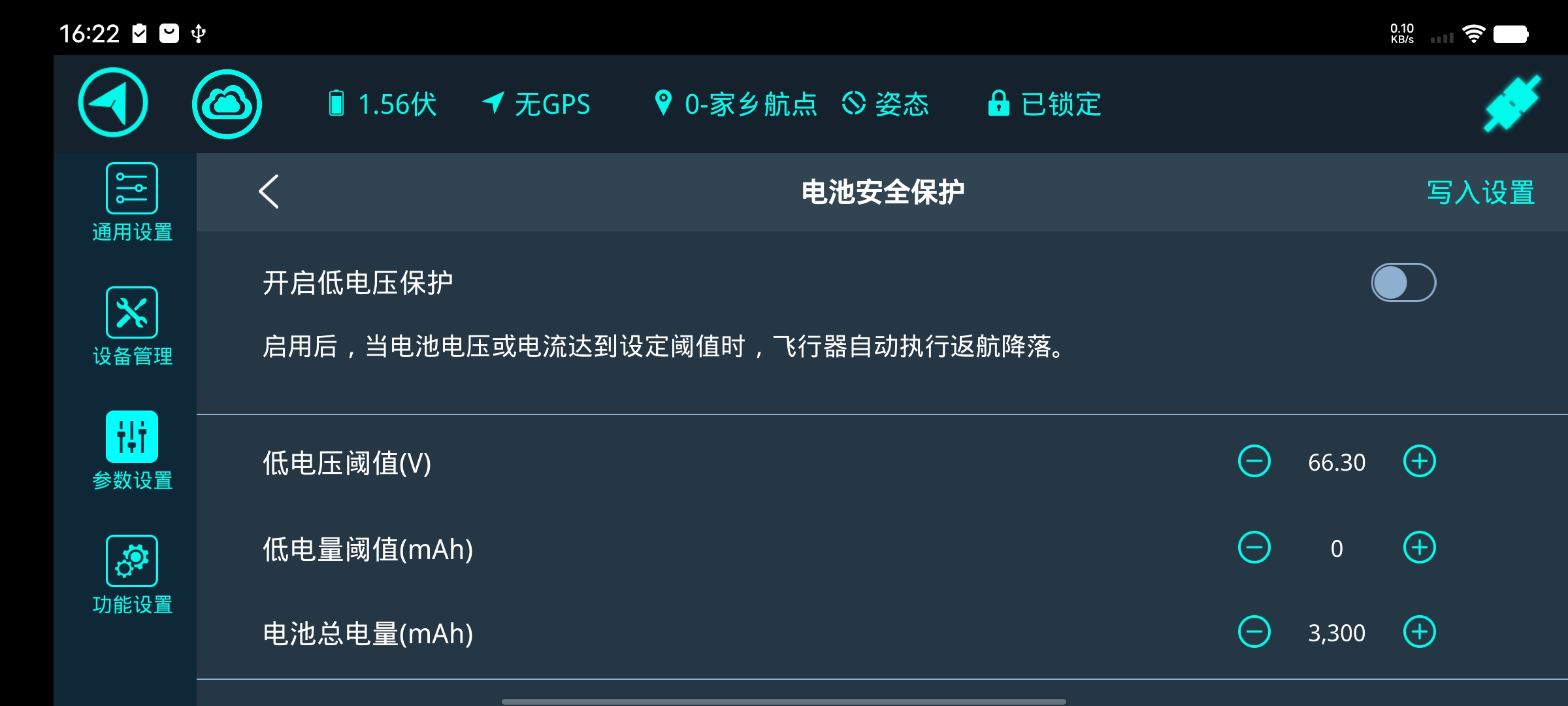
6.4.7. 电池安全保护
在参数设置界面点击电池安全保护

- 启用时,在检测电压低于设置值时,会发出低电压警报,并且触发保护执行返航降落;
- 不启用时,会发出低电压报警,但不执行返航降落。
- 注意低电量与电池总电量不需要进行修改
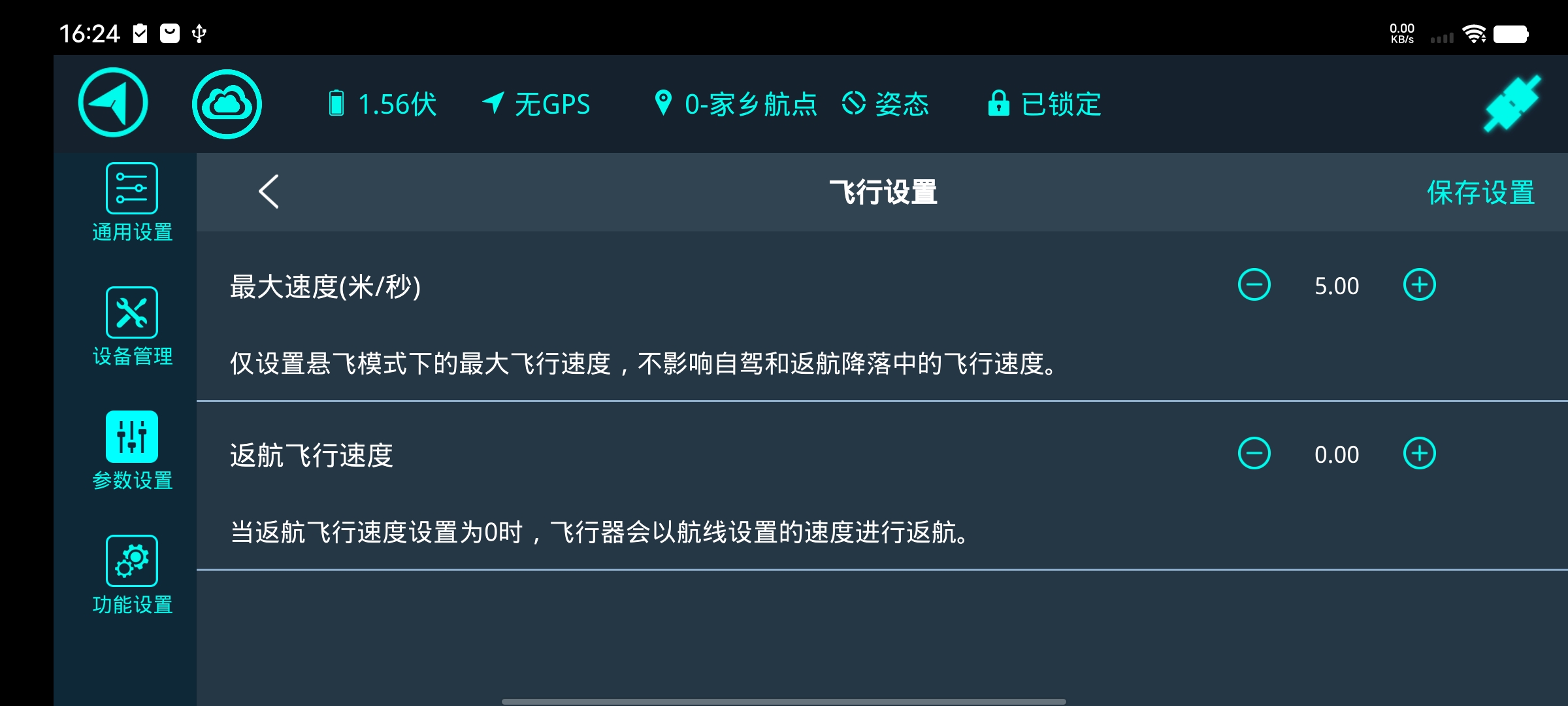
6.4.8. 最大速度限制
在参数设置界面点击飞行设置
- 最大速度:悬飞模式下最大的飞行速度
- 返航飞行速度:返航降落模式下最大的飞行速度
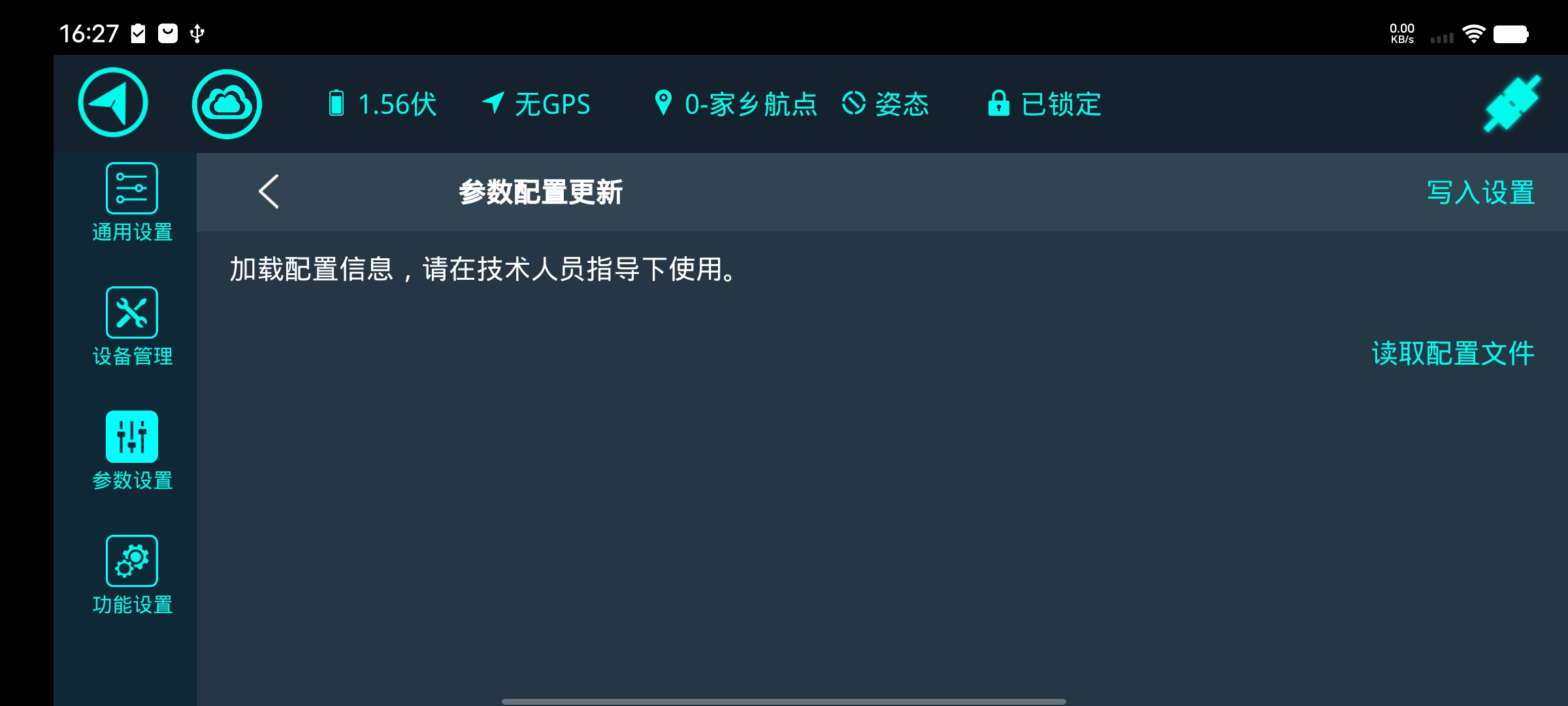
6.4.9. 配置更新
在参数设置界面中点击参数配置更新

有需要时点击读取配置文件,在平板目录中找到事先保存的配置文件,点击写入即可。
- 一般此功能为远程售后时使用,例如远程指导现场用户对飞行器进行更新。
注意:在提示“正在更新”时不可断开地面站与飞行器的连接。
6.4.10. 电子围栏
在功能设置界面点击电子围栏。

电子围栏是以起飞点位置为圆心的圆形或圆柱型。

功能介绍表:
| 序号 | 名称 | 说明 |
|---|---|---|
| 1 | 围栏开关 | 电子围栏的总开关 |
| 2 | 最大高度 | 电子围栏限制的高度(最小值为 10m) |
| 3 | 最大半径 | 电子围栏限制的范围(最小值为 30m) |
| 4 | 触发类型 | 用以设置电子围栏限制的类型:高度、半径、高度与半径 |
| 5 | 执行动作 | 用以设置当飞行器触发围栏边界时执行的动作:仅通知、返航降落 |
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)